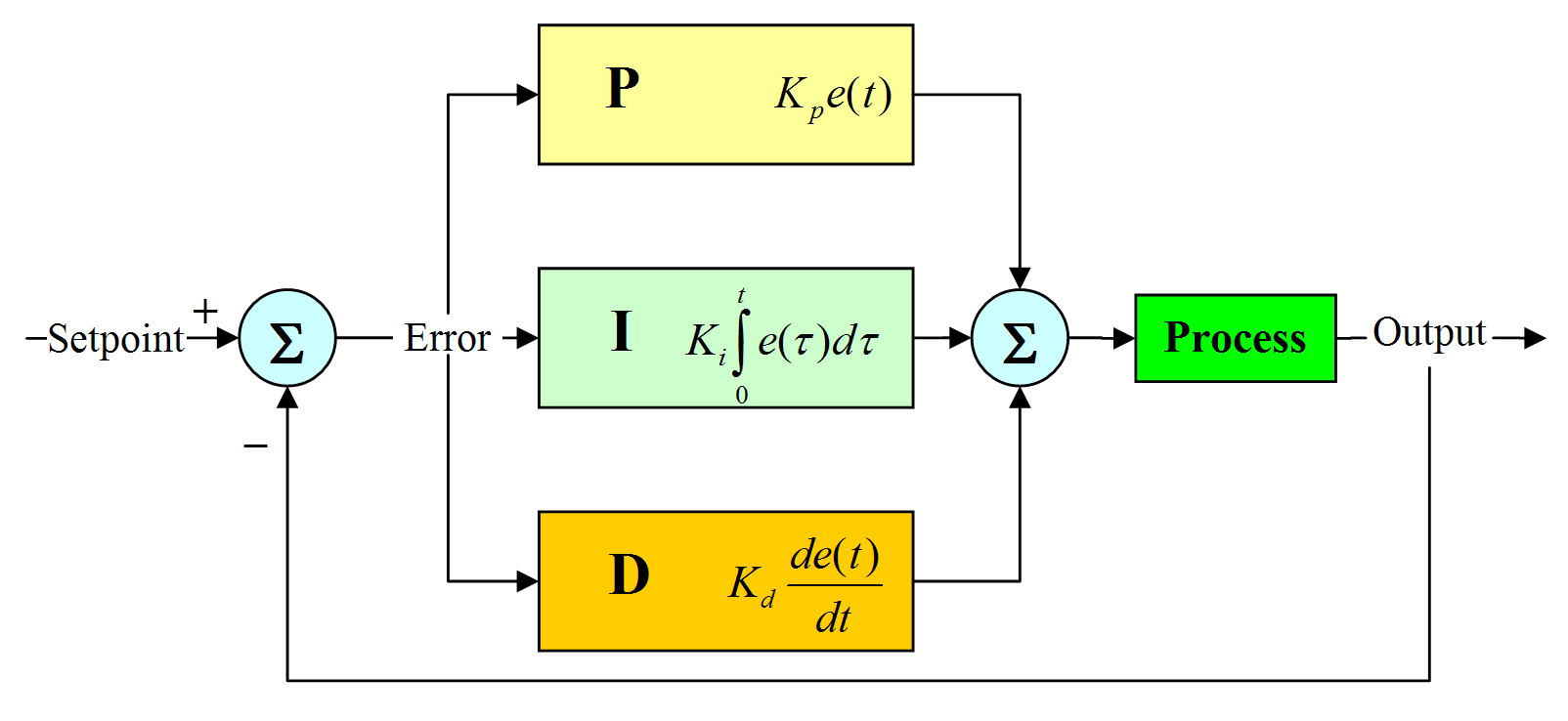
En este blog aprenderemos las características de los controles P (Proporcional), I (Integral) y D (Derivativo), para poder utilizarlos y obtener una respuesta de nuestro sistemas. Aqui podemos apreciar la representacion de un sistemas con retroalimentacón unitaria

En el grafico podemos ver la planta a controlar y el controlador que nos ayuda a ver el comportamineto de la planta.
La sintonización de los controladores Propor-cional
- Integral - Derivativo o simplemente controladores PID, consiste en la determinación del ajuste de
sus parámetros
(Kc, Ti, Td), para lograr un comportamiento
del sistema
de control aceptable y robusto de conformidad
con algún criterio de desempeño establecido.
Hay que establecer los diferentes tipos de funcionamiento que pueden presentarse en un lazo de control realimentado, en el cual hay dos entradas el valor deseado r(t) y la
perturbación z(t) y una salida la señal realimentada y(t)
Considerando las variables en el dominio de la variable compleja s y se define Gc(s) y Gp(s) como la función de tranferencia del controlador y de la planta respectivamente, a partir del diagrama del bloques del sistema de control de lazo cerrado, se obtiene que la señal realimentada, representación de la variable controlada, está dada por:

Aqui debemos tener en cuenta que hay dos posibles condiciones de operación del sistema de control en primer lugar.
Servomecanismo (z = 0)

Estorequiere de un seguimiento para el valor deseado, en segundo lugar:
Regulador (r=0)

Dado que los
numeradores de las funciones de
transferencia de lazo cerrado
(2) y (3) son diferentes, no necesariamente un buen ajuste del controlador para operar
como servomecanismo, proveerá un buen
funcionamiento como regulador, razón por la cual
se han
desarrollado procedimientos de sintonización para ambos tipos de
operación.
En la industria de procesos, la mayor parte
de los controladores se
utilizan para responder a un cambio en la perturbación, y se requiere de una
buena regulación para seguir el cambio en el valor deseado, con excepción de
los controladores esclavos en los sistemas de control en cascada.
Si el controlador se ha sintonizado
para lograr una buena respuesta en un cambio
en el valor deseado, no
eliminará las perturbaciones en forma efectiva, si el sistema contiene un
integrador o si su constante de tiempo es grande.
Es importante, entonces, determinar los requisitos de
funcionamiento del lazo de control para seleccionar el procedimiento de
sintonización adecuado.
El desarrollo de los métodos de sintonización ha sido extenso desde
que Ziegler y Nichols propu- sieron su procedimiento en 1942. Normalmente, se
dividen en métodos de lazo abierto y métodos de lazo cerrado.
Método de Lazo Abierto
Es el camino mas corto entre la entrada y la salida de un sitema.
Produciendo un cambio escalón a la salida del controlador se obtiene la curva
de reacción del proceso.
Método de Lazo Cerrado
El controlador opera automaticamente produceiendo un cambio en el valor deseado se obtiene información del comportamineto dinámico del sitema para identificar un modelo de orden reducido para el proceso, o de las características de la oscilación sostenida del mismo, para utulizarla en el càlculo de los parámetros del controlador.
Controladores
Los controladores PID tienen algunas de las sigueinetes funciones de tranferencia.
Controlador PID-Ideal

Controlador PID-Serie

Controlador PID-Industrial

Metodo de Sintonización de Lazo Abierto
Los procedimientos de sintonización de lazo abierto utilizando un modelo de la planta que se obtiene, a partir de la curva de reacción del proceso, tenemos los siguientes:
MODELOS

A continuaciòn presenta algunas de las técnicas de identificación de lazo abierto y lazo cerrado más
utilizadas para la obtención de estos modelos.
Método de Ziegler
y Nichols
El criterio de desempeño que seleccionaron fue el de un decaimiento de 1/4, o sea que el error decae en la cuarta parte de un periodo de oscilación.
Las ecuaciones fueron
determinadas de forma empírica a partir de pruebas realizadas en el laboratorio con diferentes procesos, y
están basadas en un modelo de primer orden más tiempo muerto identificado por el método
de la tangente, para un
funcionamiento del lazo de control como regulador con un controlador PID-Ideal.

Para poder determinar la respuesta al escalón de la planta o sistema
controlado, se debe retirar el controlador PID y sustituirlo por una
señal escalón aplicada al accionador.


En la imagen siguiente se puede ver representado en rojo la entrada
escalón al accionador o señal c(t). En azul se representa la salida del
sistema medida por el sensor o señal h(t). El escalón de entrada c(t)
debe estar entre el 10% y el 20% del valor nominal de entrada.
Como puede apreciarse, la respuesta del sistema presenta un retardo, también llamado tiempo muerto, representado por T1.
Como puede apreciarse, la respuesta del sistema presenta un retardo, también llamado tiempo muerto, representado por T1.

Para calcular los parámetros se comienza por trazar una línea recta tangente a la señal de
salida del sistema (curva azul). Esta tangente está dibujada en la
imagen con una recta a trazos.
El tiempo T1 corresponde al tiempo muerto. Este es el tiempo que tarda el sistema en comenzar a responder. Este intervalo se mide desde que la señal escalón sube, hasta el punto de corte de la recta tangente con el valor inicial del sistema, que en este caso es el valor 25ºC
El tiempo T2 es el tiempo de subida. Este tiempo se calcula desde el punto en el que la recta tangente corta al valor inicial del sistema hasta el punto en el que la recta tangente llega al valor final del sistema.
El tiempo T1 corresponde al tiempo muerto. Este es el tiempo que tarda el sistema en comenzar a responder. Este intervalo se mide desde que la señal escalón sube, hasta el punto de corte de la recta tangente con el valor inicial del sistema, que en este caso es el valor 25ºC
El tiempo T2 es el tiempo de subida. Este tiempo se calcula desde el punto en el que la recta tangente corta al valor inicial del sistema hasta el punto en el que la recta tangente llega al valor final del sistema.

Además de estos dos tiempos característicos también hay que calcular la variación de la señal escalón dX y la variación de la respuesta del sistema dY.
En el caso de ejemplo que aparece en las imágenes, la variación de la señal escalón corresponde a dX = 5 voltios de señal de control c(t) y la variación del sistema corresponde a dY = 200ºC medidos por el sensor h(t).
A partir de estos valores se puede calcular la constante del sistema Ko:
Y a partir de la constante Ko se pueden calcular los parámetros del controlador PID con acción solo proporcional (P), proporcional e integral (PI) o proporcional integral y derivativa (PID):
En el caso de ejemplo que aparece en las imágenes, la variación de la señal escalón corresponde a dX = 5 voltios de señal de control c(t) y la variación del sistema corresponde a dY = 200ºC medidos por el sensor h(t).
A partir de estos valores se puede calcular la constante del sistema Ko:
Ko = (dX * T2) / (dY * T1)
Y a partir de la constante Ko se pueden calcular los parámetros del controlador PID con acción solo proporcional (P), proporcional e integral (PI) o proporcional integral y derivativa (PID):

La constante Kp corresponde a la ganancia proporcional, Ti es la constante de tiempo integral y Td es la constante de tiempo derivativa. En el caso de tener el controlador PID configurado con las ganancias integral Ki y derivativa Kd en vez de los tiempos Ti y Td, hay que tener en cuenta las siguientes relaciones entre ellos:
Con lo cual la tabla de valores para ajustar el controlador PID será la siguiente:
Ki = Kp / Ti
Kd = Kp * Td
Kd = Kp * Td
Con lo cual la tabla de valores para ajustar el controlador PID será la siguiente:

En el desarrollo de su método de sintonización Ziegler y Nichols no consideraron que el proceso fuera auto regulado. Cohen y Coon[8] introduje-
ron, entonces,
un índice de auto regulación de- finido como m = tm/t y plantearon nuevas ecua-
ciones de sintonización. Estas se basan en el me-
jor
modelo de primer
orden más tiempo
muerto que se pueda obtener
para lazos de control que
funcionan como regulador, con el criterio
de de- sempeño de decaimiento de 1/4 con sobrepaso mí-
nimo, y con mínima área bajo la curva de respues- ta, y un
controlador PID-Ideal. Las ecuaciones
son:


Método de López, Miller,
Smith y Murril
El primer método basado en criterios
integrales que presentó ecuaciones para el cálculo
de los parámetros del controlador fue desarrollado por López
et aly es conocido
como el método de López.
Definiendo una función de costo de la forma:

Donde F es una función del error y del tiempo,se obtiene un valor que caracteriza la respuesta del sistema. Entre menor sea el valor de F, mejor será el
desempeño del sistema de con- trol,
por ello,
un desempeño
óptimo se obtiene cuando F es mínimo.
Como F es una
función de los parámetros del controlador (Kc, Ti, Td ), el valor mínimo de F se obtiene resolviendo las siguientes ecuaciones:

La optimización de los criterios de desempeño in- tegrales de López está basada
en el
mejor modelo de primer orden más
tiempo muerto que se pueda
obtener, para
lazos de control
que funcionan como reguladores con un controlador PID-Ideal.
Las ecuaciones de sintonización son:

Método de Kaya y Sheib
Mientras López
desarrolló el método
de sintonización para
un
controlador
PID-Ideal, Kaya y Sheib realizaron lo
mismo para controladores que denominaron PID-Clásico (PID-Serie), PID-
No
Interactuante (una variación del PID-Paralelo)
y PID-Industrial.
El procedimiento de sintonización está basado en el mejor modelo de primer orden más
tiempo muerto que se pueda obtener para lazos de con- trol que funcionan como
reguladores. El criterio de desempeño corresponde a la minimización de alguno de los criterios integrales y el controlador
a uno de los indicados
anteriormente.
Las ecuaciones de
sintonización son las mismas dadas por López (14) y los valores de los parámetros a a f se muestran en el Cuadro

Método de Sung, O, Lee, Lee y Yi
Los métodos de sintonización de controladores que optimizan los
criterios integrales, vistos anteriormente,
se basan en un modelo de primer orden más tiempo muerto. Sung
et al. Por su par-
te, basó su procedimiento de sintonización en un
modelo de segundo orden más tiempo
muerto
para un proceso como el dado por (9b), identificado mediante la realización de una prueba con realimentación por relé, seguida por una con control P.
El procedimiento está basado en el mejor modelo de segundo
orden más tiempo muerto que se pueda obtener para lazos de control que funcionan como reguladores. El criterio de desempeño corresponde a la minimización de la ITAE y el controlador un PID-Ideal. El
ajuste de las ecuaciones la realizaron para 0,05 £ tm/t £ 2,0.
Las ecuaciones de sintonización son:

MÉTODOS DE SINTONIZACIÓN DE LAZO
CERRADO
Este método no requiere retirar el controlador PID del lazo cerrado. En este caso sólo hay que reducir al mínimo la acción derivativa y la acción integral del regulador PID. El ensayo en lazo cerrado consiste en aumentar poco a poco la ganancia proporcional hasta que el sistema oscile de forma mantenida ante cualquier perturbación. Esta oscilación debe ser lineal, sin saturaciones. En este momento hay que medir la ganancia proporcional, llamada ganancia crítica o Kc, y el periodo de oscilación Tc en segundos.

Una vez hallados estos dos parámetros se pueden calcular los parámetros del controlador PID con acción solo proporcional (P), proporcional e integral (PI) o proporcional integral y derivativa (PID):

Ejemplo de sintonización de PID con la ganancia crítica
Vamos a realizar una sintonización del sistema térmico simulado anteriormente:
La primera operación será la de anular las acciones derivativa e integral:
Kd = 0
Ki = 0
Si el sistema PID utilizase tiempos, habría que hacer Td = 0 y Ti = infinito
A continuación se fija una temperatura de trabajo en la referencia y se aumenta la ganancia proporcional hasta conseguir una respuesta oscilatoria mantenida.
Con una ganancia proporcional Kp = 0.40 la respuesta todavía está amortiguada:

Al aumentar la ganancia proporcional hasta Kp = 0.43 se obtiene una respuesta con oscilaciones mantenidas:

Al aumentar la ganancia hasta Kp = 0.45, las oscilaciones crecen en el tiempo.

En este caso, por lo tanto, la ganancia crítica y el periodo son:
Kc = 0.43
Tc = 21/4 = 5.3
Tc = 21/4 = 5.3
A partir de este valor se calculan los parámetros del controlador PID:

Como puede comprobarse, los valores son semejantes a los valores obtenidos anteriormente con el método de la respuesta al escalón.
Introduciendo estos valores en la hoja de cálculo se obtiene la siguiente respuesta del sistema térmico con controlador PID:

En este caso también se puede terminar de afinar el regulador PID a mano para conseguir una respuesta un poco más rápida y estable.
Referencias:
Trabajo realizado por:
Ney Andrade, Adriana Naranjo, Rolando Tipan y Lino Freire, estudiantes de la ESPOCH ING. CONTROL Y REDES INDUSTRIALES